

Diferença de desempenho do motor 1: velocidade/torque/tamanho
Existem diversos tipos de motores no mundo. Motores grandes e motores pequenos. Um motor que se move para frente e para trás em vez de girar. Um motor que, à primeira vista, não deixa claro por que é tão caro. No entanto, todos os motores são escolhidos por um motivo. Então, que tipo de motor, desempenho ou características o seu motor ideal precisa ter?
O objetivo desta série é fornecer conhecimento sobre como escolher o motor ideal. Esperamos que seja útil na sua escolha e que ajude as pessoas a aprenderem o básico sobre motores.
As diferenças de desempenho a serem explicadas serão divididas em duas seções separadas, conforme segue:
Velocidade/Torque/Tamanho/Preço ← Os itens que abordaremos neste capítulo
Precisão em velocidade/suavidade/vida útil e facilidade de manutenção/geração de poeira/eficiência/calor
Geração de energia/vibração e ruído/medidas de mitigação de gases de escape/ambiente de uso
1. Expectativas para o motor: movimento rotacional
Um motor geralmente se refere a um dispositivo que obtém energia mecânica a partir de energia elétrica e, na maioria dos casos, a um motor que realiza movimento rotacional. (Existe também o motor linear, que realiza movimento retilíneo uniforme, mas vamos deixá-lo de lado desta vez.)
Então, que tipo de rotação você deseja? Deseja que gire com força, como uma furadeira, ou que gire fracamente, mas em alta velocidade, como um ventilador elétrico? Ao focar na diferença entre o movimento rotacional desejado, as duas propriedades de velocidade de rotação e torque tornam-se importantes.
2. Torque
Torque é a força de rotação. A unidade de torque é N·m, mas no caso de motores pequenos, mN·m é comumente usada.
O motor foi projetado de diversas maneiras para aumentar o torque. Quanto mais espiras do fio eletromagnético, maior o torque.
Como o número de voltas é limitado pelo tamanho fixo da bobina, utiliza-se fio esmaltado com um diâmetro maior.
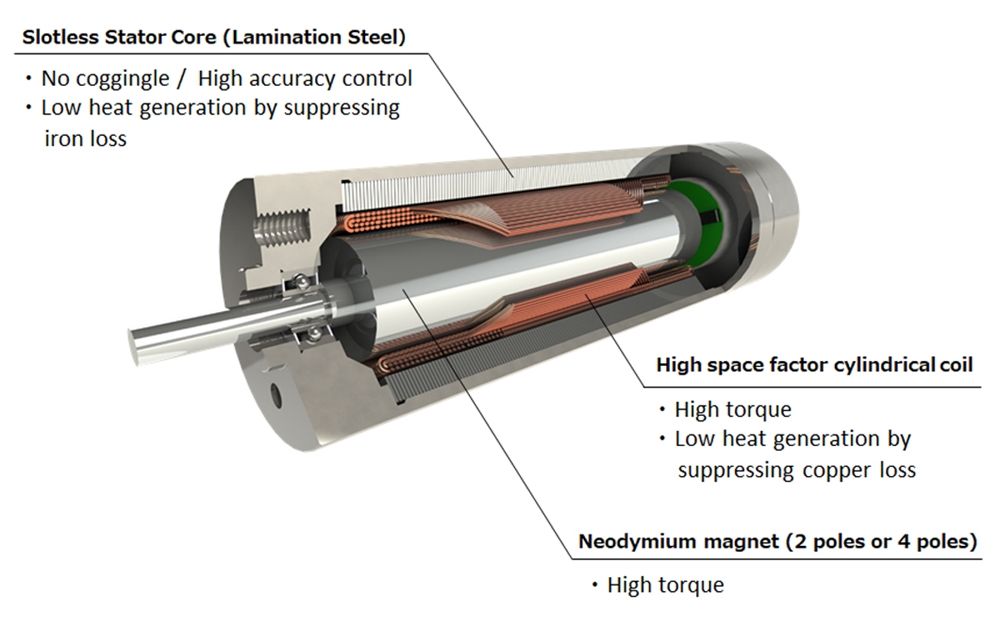
Nossa série de motores brushless (TEC) está disponível em 8 tamanhos com diâmetro externo de 60 mm: 16 mm, 20 mm, 22 mm, 24 mm, 28 mm, 36 mm e 42 mm. Como o tamanho da bobina aumenta com o diâmetro do motor, é possível obter um torque maior.
Ímãs potentes são usados para gerar grandes torques sem alterar o tamanho do motor. Os ímãs de neodímio são os ímãs permanentes mais potentes, seguidos pelos ímãs de samário-cobalto. No entanto, mesmo usando ímãs fortes, a força magnética irá escapar do motor, e essa força magnética perdida não contribuirá para o torque.
Para aproveitar ao máximo o forte magnetismo, uma fina camada de material funcional chamada placa de aço eletromagnético é laminada para otimizar o circuito magnético.
Além disso, como a força magnética dos ímãs de samário-cobalto é estável em relação às mudanças de temperatura, o uso desses ímãs permite acionar o motor de forma estável em ambientes com grandes variações de temperatura ou altas temperaturas.
3. Velocidade (rotações)
O número de rotações de um motor é frequentemente chamado de "velocidade". É a medida de quantas vezes o motor gira por unidade de tempo. Embora "rpm" seja comumente usado como rotações por minuto, também é expresso como "min⁻¹" no Sistema Internacional de Unidades (SI).
Comparado ao torque, aumentar o número de rotações não é tecnicamente difícil. Basta reduzir o número de espiras na bobina para aumentar o número de rotações. No entanto, como o torque diminui à medida que o número de rotações aumenta, é importante atender aos requisitos tanto de torque quanto de rotações.
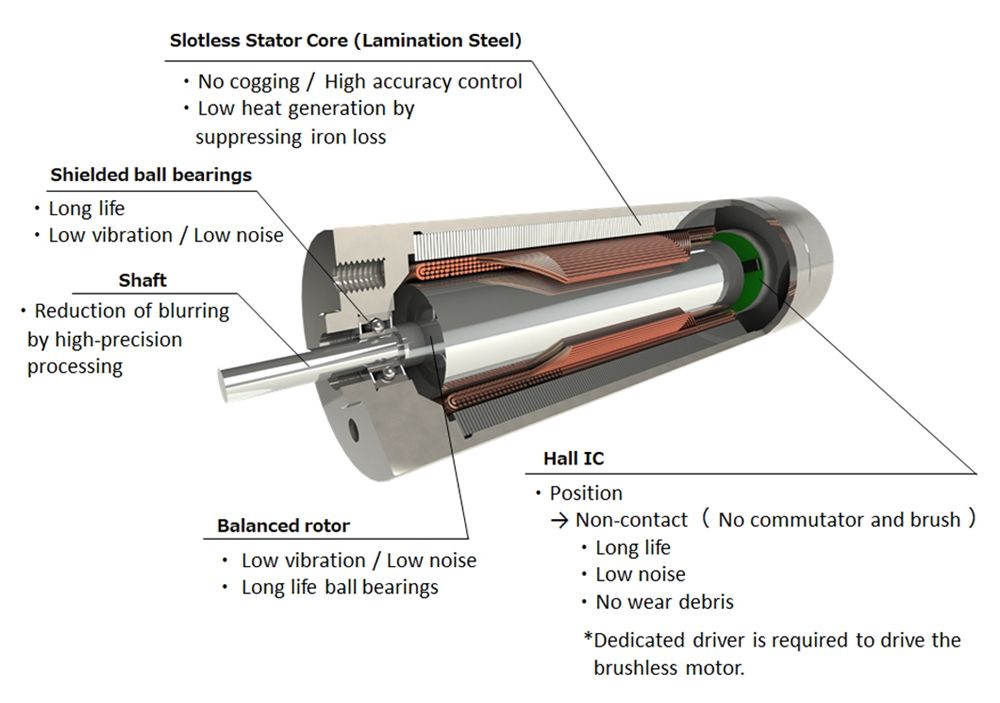
Além disso, em caso de uso em alta velocidade, é melhor utilizar rolamentos de esferas em vez de mancais de deslizamento. Quanto maior a velocidade, maior a perda por resistência ao atrito e menor a vida útil do motor.
Dependendo da precisão do eixo, quanto maior a velocidade, maiores serão os problemas relacionados a ruído e vibração. Como um motor sem escovas não possui escovas nem comutador, ele produz menos ruído e vibração do que um motor com escovas (que coloca a escova em contato com o comutador rotativo).
Passo 3: Tamanho
Quando se trata do motor ideal, o tamanho do motor também é um dos fatores importantes para o desempenho. Mesmo que a velocidade (rotações) e o torque sejam suficientes, é inútil se ele não puder ser instalado no produto final.
Se você apenas deseja aumentar a velocidade, pode reduzir o número de voltas do fio, mesmo que esse número seja pequeno, mas, a menos que haja um torque mínimo, ele não girará. Portanto, é necessário encontrar maneiras de aumentar o torque.
Além de utilizar os ímãs potentes mencionados acima, também é importante aumentar o fator de ciclo de trabalho do enrolamento. Já falamos sobre reduzir o número de voltas do fio para garantir o número de rotações, mas isso não significa que o fio deva ser enrolado de forma frouxa.
Ao utilizar fios grossos em vez de reduzir o número de espiras, é possível conduzir grandes quantidades de corrente e obter um torque elevado mesmo na mesma velocidade. O coeficiente espacial indica a densidade do enrolamento do fio. Seja aumentando o número de espiras finas ou reduzindo o número de espiras grossas, esse é um fator importante para a obtenção de torque.
Em geral, a potência de um motor depende de dois fatores: ferro (ímã) e cobre (enrolamento).
Data da publicação: 21/07/2023